Watch 10 video solutions for Cheapest Flights Within K Stops, a medium level problem involving Dynamic Programming, Depth-First Search, Breadth-First Search. This walkthrough by take U forward has 312,097 views views. Want to try solving it yourself? Practice on FleetCode or read the detailed text solution.
There are n cities connected by some number of flights. You are given an array flights where flights[i] = [fromi, toi, pricei] indicates that there is a flight from city fromi to city toi with cost pricei.
You are also given three integers src, dst, and k, return the cheapest price from src to dst with at most k stops. If there is no such route, return -1.
Example 1:
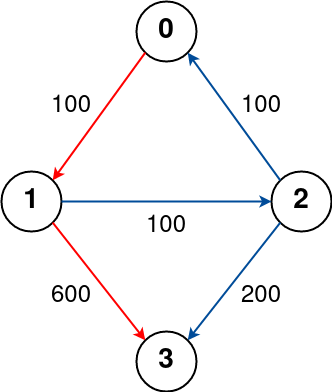
Input: n = 4, flights = [[0,1,100],[1,2,100],[2,0,100],[1,3,600],[2,3,200]], src = 0, dst = 3, k = 1 Output: 700 Explanation: The graph is shown above. The optimal path with at most 1 stop from city 0 to 3 is marked in red and has cost 100 + 600 = 700. Note that the path through cities [0,1,2,3] is cheaper but is invalid because it uses 2 stops.
Example 2:
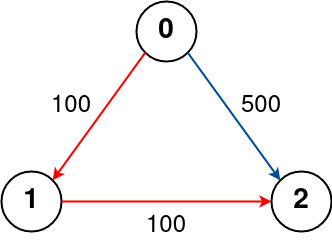
Input: n = 3, flights = [[0,1,100],[1,2,100],[0,2,500]], src = 0, dst = 2, k = 1 Output: 200 Explanation: The graph is shown above. The optimal path with at most 1 stop from city 0 to 2 is marked in red and has cost 100 + 100 = 200.
Example 3:
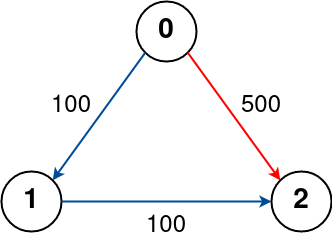
Input: n = 3, flights = [[0,1,100],[1,2,100],[0,2,500]], src = 0, dst = 2, k = 0 Output: 500 Explanation: The graph is shown above. The optimal path with no stops from city 0 to 2 is marked in red and has cost 500.
Constraints:
1 <= n <= 1000 <= flights.length <= (n * (n - 1) / 2)flights[i].length == 30 <= fromi, toi < nfromi != toi1 <= pricei <= 1040 <= src, dst, k < nsrc != dstProblem Overview: You are given n cities connected by flights where each edge has a price. The task is to find the cheapest cost from src to dst using at most k stops. The challenge is balancing shortest-path logic with a constraint on the number of intermediate nodes.
Approach 1: Breadth-First Search with Cost Tracking (Time: O(E * K), Space: O(V + E))
This approach treats the graph as levels of stops and explores it using Breadth-First Search. Build an adjacency list from the flights array, then perform BFS where each level represents one additional stop. Maintain the current cost to each node and only continue exploring if the new path is cheaper than previously recorded costs. The key insight is limiting traversal depth to k + 1 edges while pruning expensive paths early. This keeps exploration efficient even if the graph has many connections.
Approach 2: Dijkstra's Algorithm with Stop Constraint (Time: O(E log (V * K)), Space: O(V * K))
This method adapts shortest path logic using a min-heap (priority queue). Instead of storing only the node and cost, the state also tracks how many stops were used to reach the node. The heap always expands the cheapest path first. When a node is popped, its neighbors are pushed with updated cost and stop count, as long as the stop limit has not been exceeded. This guarantees the cheapest valid route is discovered early and works well when flight graphs are dense.
Recommended for interviews: Interviewers usually expect the Dijkstra-style solution because it directly models the constrained shortest-path problem and demonstrates familiarity with priority queues. Starting with the BFS idea shows you understand graph traversal with level constraints, but implementing the heap-based approach shows stronger mastery of graph optimization techniques.
| Approach | Time | Space | When to Use |
|---|---|---|---|
| BFS with Cost Tracking | O(E * K) | O(V + E) | When the stop limit is small and you want a simple level-based traversal. |
| Dijkstra with Stop Constraint | O(E log (V * K)) | O(V * K) | General case for weighted graphs where the cheapest path must respect stop limits. |