Given a binary tree
struct Node {
int val;
Node *left;
Node *right;
Node *next;
}
Populate each next pointer to point to its next right node. If there is no next right node, the next pointer should be set to NULL.
Initially, all next pointers are set to NULL.
Example 1:
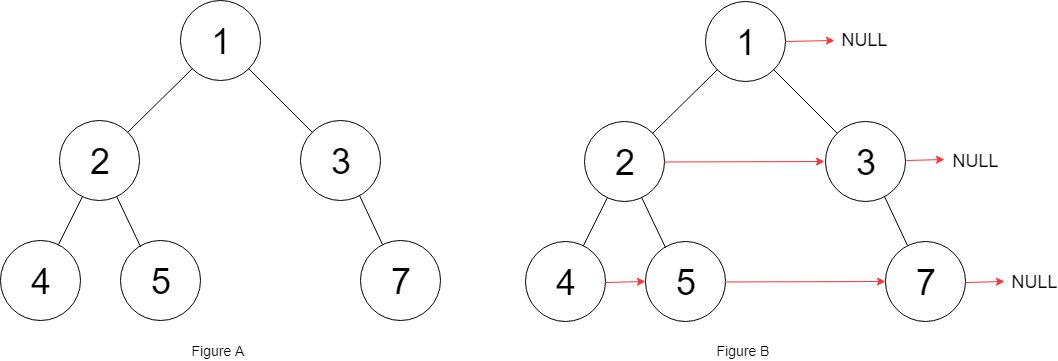
Input: root = [1,2,3,4,5,null,7] Output: [1,#,2,3,#,4,5,7,#] Explanation: Given the above binary tree (Figure A), your function should populate each next pointer to point to its next right node, just like in Figure B. The serialized output is in level order as connected by the next pointers, with '#' signifying the end of each level.
Example 2:
Input: root = [] Output: []
Constraints:
[0, 6000].-100 <= Node.val <= 100Follow-up:
In #117 Populating Next Right Pointers in Each Node II, the goal is to connect each node in a binary tree to its immediate neighbor on the same level using the next pointer. Unlike the simpler version of the problem, the tree is not guaranteed to be perfect, which makes traversal and linking slightly more complex.
A common approach is level-order traversal (BFS) using a queue. By processing nodes level by level, you can link each node to the next node in the queue for that level. This method is intuitive and works for any binary tree, but it requires O(n) additional space in the worst case due to the queue.
A more optimized approach uses the already established next pointers to traverse levels while building the next level using a dummy head technique. This allows you to connect children nodes as you iterate through the current level, achieving O(1) extra space (excluding recursion or data structures) while maintaining O(n) time complexity.
| Approach | Time Complexity | Space Complexity |
|---|---|---|
| Breadth-First Search (Queue) | O(n) | O(n) |
| Pointer Traversal with Dummy Head (Constant Space) | O(n) | O(1) |
NeetCode
This approach uses a breadth-first search (BFS) strategy by employing a queue to keep track of nodes at the current level and connect their children nodes from left to right. After processing all nodes on a level, we move to the children (if any), ensuring the next pointers are correctly set.
Time Complexity: O(n), where n is the number of nodes in the tree since each node is enqueued and dequeued once.
Space Complexity: O(n) for the queue in the worst case where the last level of the tree has a maximum number of nodes.
1import java.util.LinkedList;
2import java.util.Queue;
3
4class Node {
5 public int val;
This solution utilizes a queue to maintain the nodes at the current level. As nodes are processed, their children are enqueued, ensuring a level-order sequence of connections. Each node's next is set to the next node in the queue.
This approach leverages a two-pointer or head-tail strategy to eliminate the need for extra storage space beyond two pointers. The idea is to work with two nested loops; an outer loop goes level by level, and an inner loop connects nodes within the same level by their next pointers.
Time Complexity: O(n) since each node is processed once.
Space Complexity: O(1), only utilizing a few pointers.
Watch expert explanations and walkthroughs
Practice problems asked by these companies to ace your technical interviews.
Explore More ProblemsJot down your thoughts, approach, and key learnings
Yes, variations of this problem frequently appear in technical interviews at companies like Google, Amazon, and Meta. It tests understanding of tree traversal, pointer manipulation, and space optimization.
A queue is commonly used in the BFS approach to process nodes level by level. However, the more optimized solution avoids extra data structures and relies on pointer manipulation to connect nodes across levels.
The optimal approach uses existing next pointers to traverse each level while linking nodes in the next level with a dummy head pointer. This method runs in O(n) time and uses O(1) extra space, making it efficient for large binary trees.
The earlier version assumes a perfect binary tree, allowing simpler traversal patterns. In this version, the tree may be incomplete, so you must carefully track children and build connections across uneven levels.
This C approach uses an iterative strategy that does not require a queue. Instead, it uses head to signify the current level's starting node and a pair of pointers, nextHead and prev, to indicate the next level's starting point and moving connector.